Blossom Robots - LASIGE Summer of Research 2025
Research on social robotics using Blossom Robots developed at Cornell University. Study on human-robot interaction with facial mimicry and gaze detection capabilities.
About the Project
This project was developed during LASIGE Summer of Research 2025, in collaboration with a colleague. It was my first formal research project, marking the transition into my second year of Computer Science Engineering.
The project focused on studying robotic systems based on Blossom Robots developed at Cornell University by Michael Suguitan and Guy Hoffmann.
Development
We created custom components for a dual-robot system:
- Custom Graphical Interface
- Facial Mimicry Controller
- Dance Controller
- 3D printing and assembly work for the robots
System Capabilities
The dual-robot system demonstrated:
- Facial Mimicry: Ability to replicate head movements
- Gaze Detection: Participant eye-tracking system (in adjustment phase)
Research Objective
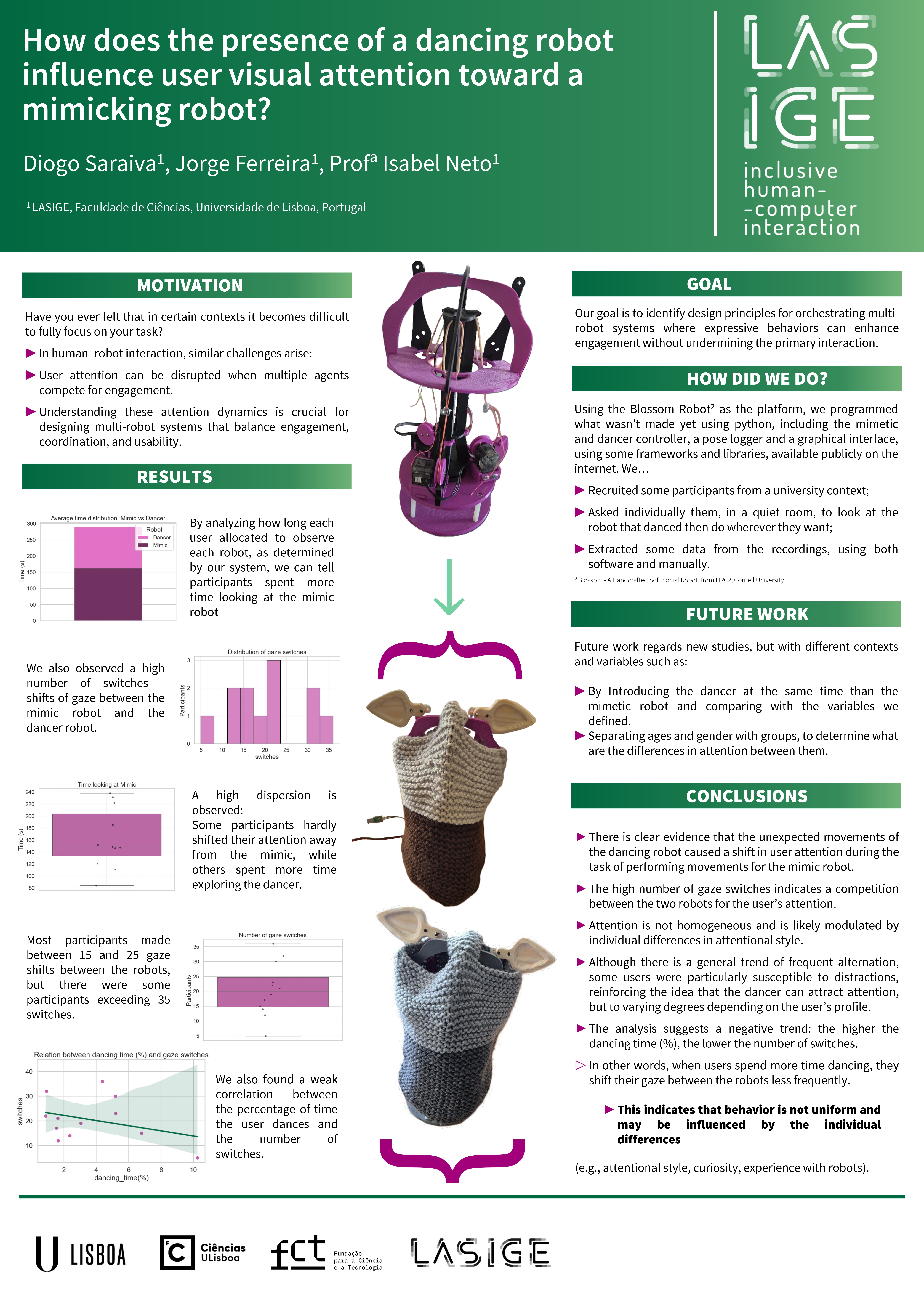
The primary goal was to analyze which of the two robots participants directed more attention toward.
Results
With 12 study participants, we observed a slight tendency for most to focus their gaze more on the mimetic robot than the dancing robot. However, due to the limited sample size, these differences cannot be stated with statistical precision.
Context
This project was conducted as part of the LASIGE Summer of Research program, an initiative by LASIGE (Large-Scale Informatics Systems Laboratory) at Faculdade de Ciências, Universidade de Lisboa, providing undergraduate students the opportunity to participate in summer research projects.
Resources
- GitHub Repository: github.com/DiogoSaraiva/blossom-lasige-research